
Maciej Gajdzica / GAndaLF - ucgosu.pl
Robotyka, Embedded, C
Ostatnie newsy
Jak utrzymać zadowolenie z pracy
Praca zajmuje dużą część naszego dorosłego życia. W tygodniu, jeśli odliczymy czas na sen, jest to połowa dnia, a doliczając dojazdy i codzienne obowiązki – nawet więcej. Zadowolenie z pracy jest więc bardzo ważnym czynnikiem wpływającym na nasze samopoczucie. Dzisiaj zastanowię się nad satysfakcją z pracy, wypaleniem i sposobami na utrzymanie dobrego samopoczucia. Pozwalaj sobie […]
Prima aprilis 2017
Ledwo minęła północ, a już znalazłem w necie newsa: “Z ostatniej chwili – Liroy pobił Morawieckiego”. Dotarło to do mnie dopiero po chwili – no tak, Prima Aprilis można uznać za rozpoczęty. Jeden z cytatów z internetu głosi, że 1 kwietnia to jedyny dzień w roku, kiedy ludzie zastanawiają się, czy informacje, które przeczytali, zobaczyli […]
Prima aprilis 2017
Ledwo minęła północ, a już znalazłem w necie newsa: „Z ostatniej chwili – Liroy pobił Morawieckiego”. Dotarło to do mnie dopiero po chwili – no tak, Prima Aprilis można uznać za rozpoczęty. Jeden z cytatów z internetu głosi, że 1 kwietnia to jedyny dzień w roku, kiedy ludzie zastanawiają się, czy informacje, które przeczytali, zobaczyli […]

Dlaczego warto robić unit testy?
Ostatnio w pracy miałem do wykonania dosyć proste zadanie. Chodziło o to, aby w przerwaniu od timera wykonującym się co 10 ms umieścić funkcję, która miała wykonywać się co 100 ms. W tym przerwaniu już wcześniej był wywoływany task co 10 ms i obsługa komunikacji. Napisany przeze mnie kod wyglądał mniej więcej tak: [crayon-5b7dee8b03d31487727695/] Kryje […]

Dlaczego warto robić unit testy?
Ostatnio w pracy miałem do wykonania dosyć proste zadanie. Chodziło o to, aby w przerwaniu od timera wykonującym się co 10 ms umieścić funkcję, która miała wykonywać się co 100 ms. W tym przerwaniu już wcześniej był wywoływany task co 10 ms i obsługa komunikacji. Napisany przeze mnie kod wyglądał mniej więcej tak: [crayon-5a85c0fed5746562094494/] Kryje […]

Początek prac nad kodem
Płytka została oddana do produkcji, więc ostatnio było trochę czasu, żeby usiąść do softu. W tym tygodniu udało mi się zrobić kilka rzeczy: postawić projekt na STM32F4, dodać najnowszą wersję systemu FreeRTOS – 9.0.0, uruchomić framework do unit testów CppUTest. Aktualny kod źródłowy projektu można znaleźć na moim GitHubie. Projekt STM32 Szablon projektu na STM32F4 […]

Początek prac nad kodem
Płytka została oddana do produkcji, więc ostatnio było trochę czasu, żeby usiąść do softu. W tym tygodniu udało mi się zrobić kilka rzeczy: postawić projekt na STM32F4, dodać najnowszą wersję systemu FreeRTOS – 9.0.0, uruchomić framework do unit testów CppUTest. Aktualny kod źródłowy projektu można znaleźć na moim GitHubie. Projekt STM32 Szablon projektu na STM32F4 […]
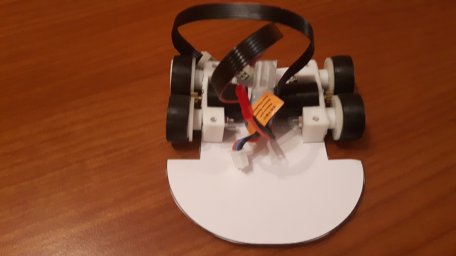
Poprawiony projekt płytki
Płytka robota, którą ostatnio zaprojektowałem, miała kilka wad. Głównym problemem była grubość ścieżek. Praktycznie wszystkie ścieżki miały tam 10 mils. Ścieżki zasilania i inne, po których mogą płynąć większe prądy powinny być odpowiednio grube. Grubsze ścieżki zapewniają mniejszą rezystancję. Poza tym jeśli płynie nimi większy prąd, mogą się nagrzać i uszkodzić. Zdarzały mi się już […]

Zestawienie wykorzystywanych elementów
Miałem na ten tydzień zaplanowanych kilka ciekawych rzeczy. Chciałem iść na spotkanie Hackerspace Trójmiasto i napisać z tego relację oraz rozpocząć pracę nad kodem źródłowym robota. Na pierwszy ogień miał iść framework do unit testów CppUTest i konfiguracja continuous integration. Niestety plany pokrzyżowała mi choroba i przez kilka ostatnich dni prowadzę tryb życia zbliżony do […]
Projekt płytki drukowanej
Po zrobieniu schematu ideowego przyszła pora na projekt płytki PCB. Udało mi się uwinąć z tym zadaniem w weekend. W tym poście opiszę, czym się kierowałem przy projekcie PCB. Wymiary robota Pierwszym krokiem do stworzenia PCB było określenie wymiarów. Byłem tutaj ograniczony przez program Eagle, który wykorzystałem do zrobienia projektu. Maksymalny rozmiar płytki możliwy w […]
Sandro Mancuso – Software Craftsman. Profesjonalizm, czysty kod i techniczna perfekcja – recenzja
Po raz kolejny dałem się złapać na ten sam chwyt. Jak widzę, że na Helionie jest promocja, nie mogę się powstrzymać i zawsze kupuję jakąś książkę. Dobrze, jeśli kończy się tylko na jednej. Tym razem padło na „Software Craftsman. Profesjonalizm, czysty kod i techniczna perfekcja” autorstwa Sandro Macuso, która została wybrana przez Helion książką roku […]
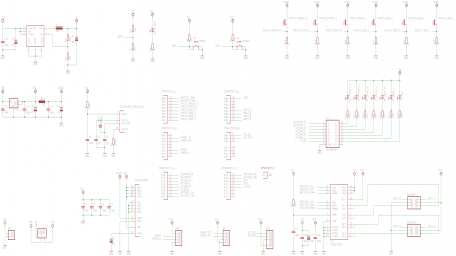
Schemat ideowy robota
Prace nad robotem ruszyły. Dodałem pierwsze commity na GitHuba, wybrałem licencję dla projektu (tym aspektem zainteresowałem się dzięki Slackowi konkursowemu, normalnie bym olał ten temat), dodałem krótkie readme, a przede wszystkim zrobiłem schemat ideowy robota. W tym wpisie opiszę wykonany schemat. Do wykonaniu schematu użyłem programu Cadsoft Eagle 7.2, czyli starszej wersji programu wydanej jeszcze […]

Micromouse – koncepcja
W poprzednim wpisie tylko ogólnie napisałem o projekcie. Teraz przyszła pora na więcej szczegółów technicznych. Opiszę więc na czym polegają zawody Micromouse, sformułuję wymagania i przedstawię koncepcję robota. Opis konkurencji Micromouse Micromouse to jedna z konkurencji odbywających się podczas zawodów robotów. Jej celem jest jak najszybsze przejechanie robota z rogu labiryntu do mety znajdującej się […]
Daj się poznać 2017
Dziś rusza konkurs Daj się poznać 2017, w którym będę brał udział. Jest to konkurs dla bloggerów piszących o programowaniu. Chodzi o to, żeby rozwijać projekt open source na GitHubie i blogować. W okresie od 1 marca do 31 maja przez 10 tygodni należy pisać po 2 posty tygodniowo. Co najmniej jeden z nich musi […]
C++ na STM32
Najczęściej wybieranym językiem do programowania mikrokontrolerów jest C. Popularna jest opinia, że C++ do tego zadania się nie nadaje. Najczęściej podawane argumenty to wolniejsze wykonywanie się kodu, większe zużycie pamięci programu i RAMu oraz częste wykorzystywanie dynamicznej alokacji pamięci. Ostatnio znalazłem na YouTube prezentację dotyczącą wykorzystania C++ przy programowaniu systemów embedded. Autor udowadnia w niej, […]