
Maciej Gajdzica / GAndaLF - ucgosu.pl
Robotyka, Embedded, C
Ostatnie newsy

Hackaton Świąteczny w Hackerspace Gdańsk
W ten weekend miałem przyjemność uczestniczyć w hackatonie świątecznym organizowanym przez gdański hackerspace. Hackerspace chciałem odwiedzić już od dłuższego czasu. ale jakoś nigdy nie mogłem się zebrać. Wystartowanie w hackatonie też było na mojej checkliście. Tak więc była możliwość upiec dwie pieczenie na jednym ogniu. Co to jest hackerspace Hackerspace to miejsce, gdzie przychodzą głównie […]

Implementacja EKF na robocie
W dzisiejszym wpisie przedstawię implementację Rozszerzonego Filtru Kalmana dla robota Micromouse. Aby dojść do tego momentu musiałem najpierw wyznaczyć model ruchu robota oraz sprawdzić działanie EKF w środowisku symulacyjnym. Można o tym poczytać we wcześniejszych wpisach. Biblioteka do obliczeń na macierzach Aby zaimplementować Filtr Kalmana na mikrokontrolerze, niezbędne będzie wykonanie pewnych obliczeń na macierzach. Mogłem […]

Implementacja EKF na robocie
W dzisiejszym wpisie przedstawię implementację Rozszerzonego Filtru Kalmana dla robota Micromouse. Aby dojść do tego momentu musiałem najpierw wyznaczyć model ruchu robota oraz sprawdzić działanie EKF w środowisku symulacyjnym. Można o tym poczytać we wcześniejszych wpisach. Biblioteka do obliczeń na macierzach Aby zaimplementować Filtr Kalmana na mikrokontrolerze, niezbędne będzie wykonanie pewnych obliczeń na macierzach. Mogłem […]

Relacja z code::dive
W dniach 14-15 listopada byłem na konferencji code::dive we Wrocławiu. Jest ona głównie poświęcona C++, ale dodatkowymi tematami miały być Rust, Go, Embedded, IoT, Security, czy Python. Wstęp jest darmowy, ale liczba miejsc jest ograniczona. Swoje zgłoszenie wysłałem dosyć późno i byłem pewny, że się nie załapie. Jednak w ostatniej chwili zwolniły się jakieś miejsca […]

Relacja z code::dive
W dniach 14-15 listopada byłem na konferencji code::dive we Wrocławiu. Jest ona głównie poświęcona C++, ale dodatkowymi tematami miały być Rust, Go, Embedded, IoT, Security, czy Python. Wstęp jest darmowy, ale liczba miejsc jest ograniczona. Swoje zgłoszenie wysłałem dosyć późno i byłem pewny, że się nie załapie. Jednak w ostatniej chwili zwolniły się jakieś miejsca […]

EKF – Rozszerzony filtr Kalmana
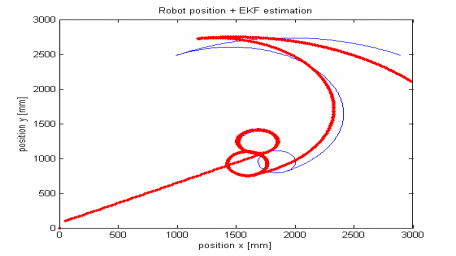
Poprzednio wyprowadziłem model stanowy robota i przygotowałem symulację do testowania algorytmów określania pozycji. Przyszła więc kolej na ich implementację. W tym wpisie skupię się na Rozszerzonym Filtrze Kalmana. Znajdzie się miejsce na wstęp teoretyczny oraz analizę implementacji w środowisku symulacyjnym. Starałem się wszystko opisać jak najprościej. Jednak aby wszystko dobrze zrozumieć potrzebna będzie zaawansowana wiedza […]
EKF – Rozszerzony filtr Kalmana
Poprzednio wyprowadziłem model stanowy robota i przygotowałem symulację do testowania algorytmów określania pozycji. Przyszła więc kolej na ich implementację. W tym wpisie skupię się na Rozszerzonym Filtrze Kalmana. Znajdzie się miejsce na wstęp teoretyczny oraz analizę implementacji w środowisku symulacyjnym. Starałem się wszystko opisać jak najprościej. Jednak aby wszystko dobrze zrozumieć potrzebna będzie zaawansowana wiedza […]
Początek prac nad estymatorem pozycji robota
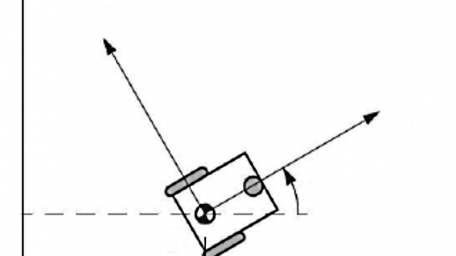
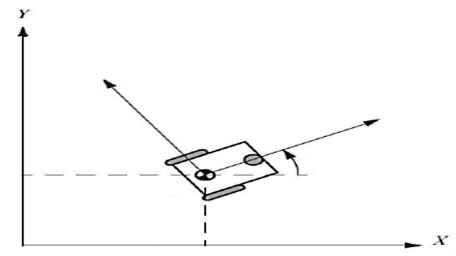
Mając gotowe regulatory prędkości silników mogę przystąpić do modułu estymacji pozycji. W tym wpisie umieszczę garść ogólnych informacji dotyczących pracy estymatora, a także wyprowadzenie modelu matematycznego robota, który będzie potrzebny do wewnętrznych obliczeń. Moduł estymacji pozycji Moduł estymacji pozycji ma za zadanie oszacować aktualne położenie robota. Estymacja jest wykonywana na podstawie pomiarów z czujników takich […]
Początek prac nad estymatorem pozycji robota
Mając gotowe regulatory prędkości silników mogę przystąpić do modułu estymacji pozycji. W tym wpisie umieszczę garść ogólnych informacji dotyczących pracy estymatora, a także wyprowadzenie modelu matematycznego robota, który będzie potrzebny do wewnętrznych obliczeń. Moduł estymacji pozycji Moduł estymacji pozycji ma za zadanie oszacować aktualne położenie robota. Estymacja jest wykonywana na podstawie pomiarów z czujników takich […]
Regulator prędkości obrotowej
W końcu udało mi się zakończyć pracę nad regulatorem prędkości obrotowej robota, z którym walczyłem od dłuższego czasu. W poprzednich wpisach opisywałem problemy z żyroskopem i spalenie płytki, co wiązało się z nowym projektem PCB. Nareszcie udało doprowadzić się temat do końca. We wpisie znajdziecie trochę matmy, dużo wykresów i opis kolejnych przygód z zepsutym […]
Regulator prędkości obrotowej
W końcu udało mi się zakończyć pracę nad regulatorem prędkości obrotowej robota, z którym walczyłem od dłuższego czasu. W poprzednich wpisach opisywałem problemy z żyroskopem i spalenie płytki, co wiązało się z nowym projektem PCB. Nareszcie udało doprowadzić się temat do końca. We wpisie znajdziecie trochę matmy, dużo wykresów i opis kolejnych przygód z zepsutym […]

Systemy bezpieczeństwa – sposoby przeciwdziałania błędom
W poprzednim artykule opisałem trochę podstawowych informacji dotyczących systemów bezpieczeństwa. Skupiłem się tam na podstawowych pojęciach i procesach. Dzisiaj mam zamiar omówić kilka aspektów technicznych. Będzie więc o tym jak takie systemy zachowują się w przypadku wykrycia błędu i jak minimalizują efekty ich wystąpienia. Safe State Celem działania systemów safety critical zwykle nie jest zapewnienie […]

Systemy bezpieczeństwa – sposoby przeciwdziałania błędom
W poprzednim artykule opisałem trochę podstawowych informacji dotyczących systemów bezpieczeństwa. Skupiłem się tam na podstawowych pojęciach i procesach. Dzisiaj mam zamiar omówić kilka aspektów technicznych. Będzie więc o tym jak takie systemy zachowują się w przypadku wykrycia błędu i jak minimalizują efekty ich wystąpienia. Safe State Celem działania systemów safety critical zwykle nie jest zapewnienie […]

Kiedy od softu zależy ludzkie życie – o systemach bezpieczeństwa
W internecie można spotkać głosy, że programiści nie wykonują odpowiedzialnych zadań i nie ma żadnych regulacji, których muszą przestrzegać. Bo co złego może się stać, jeśli strona nie będzie działać, albo komputer wywali bluescreena. W końcu świat się od tego nie zawali. Być może jest to prawdą w 99% projektów programistycznych. Jednak tam, gdzie na […]

Kiedy od softu zależy ludzkie życie – o systemach bezpieczeństwa
W internecie można spotkać głosy, że programiści nie wykonują odpowiedzialnych zadań i nie ma żadnych regulacji, których muszą przestrzegać. Bo co złego może się stać, jeśli strona nie będzie działać, albo komputer wywali bluescreena. W końcu świat się od tego nie zawali. Być może jest to prawdą w 99% projektów programistycznych. Jednak tam, gdzie na […]